
产品详情
路面轮廓粗糙度测量激光传感器
- 产品名称:路面轮廓粗糙度测量激光传感器
- 产品型号:RF60
- 产品厂商:FAE
- 产品文档:
你添加了1件商品 查看购物车
简单介绍
这些传感器用于非接触式测量和控制技术对象的位置、位移、尺寸、表面轮廓、变形、振动、分类和检测,以及测量液体和散装材料的液位。
RF60i 系列 - 用于测量路面轮廓和结构的专用激光传感器
路面轮廓粗糙度测量激光传感器
的详细介绍RF60 系列 - 用于路面轮廓和粗糙度测量的专用激光传感器

这些传感器用于非接触式测量和控制技术对象的位置、位移、尺寸、表面轮廓、变形、振动、分类和检测,以及测量液体和散装材料的液位。
RF60i 系列 - 用于测量路面轮廓和结构的专用激光传感器
6 种传感器型号:
■ 圆形激光光斑直径<1 mm
■ 高抗太阳辐射
■ 在潮湿表面上稳定运行
测量范围,毫米:
高达 1000
线性度,范围百分比:
± 0.03
测量频率,赫兹:
高达 70000
尺寸,毫米:
65x50x20 (RF603P) 89x55x28 (RF607) 62x60x20 (RF603Txt)
RF60i 激光三角测量传感器。 规格
(路面测量)
| 模板 | RF603Р | RF603Р | RF607 | RF607 | RF607 | RF603Txt | |
| 底距 X, mm | 125 | 245 | 190 | 210 | 230 | 30 | |
| 测量范围,毫米 | 500 | 1000 | 500 | 200 | 250 | 30 | |
| 线性度,范围的百分比 | ± 0.05 | ± 0.03 | ± 0.05 | ||||
| 分辨率,范围的百分比 | 0.01(仅用于数字输出) | ||||||
| 温度漂移 | 量程的 0.02% / °С | ||||||
| *大 测量频率,Hz | 9400 | 70000 | 9400 | ||||
| 光源 | 红色半导体激光器,波长 660 nm | ||||||
| 输出功率,毫瓦 | <20 | <80 | <1 | ||||
| 激光**等级 (IEC / EN 60825-1: 2014) | 3В | 2 | |||||
| 激光光斑形状 | 椭圆 | 圆形的 | |||||
| 激光光斑尺寸“范围的开始-中端”,mm | 1.7х3- 0.16х0.2- 3х5 | 1.6х2.5- 0.5х0.8- 1.6х3.5 | 0.9-1-0.9 | 0.8-0.7-0.6 | 0.8-0.7-0.5 | 0.06-0.025-0.06 | |
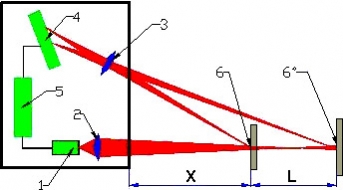
工作原理
传感器的操作基于光学三角测量原理。来自半导体激光器 1 的辐射由透镜 2 聚焦在物体 6 上。从物体反射的辐射由线性 CCD 阵列 4 上的透镜 3 收集。信号处理器 5 计算从物体到该位置的距离阵列上的光点 4。
RF60i 激光三角测量传感器订购信息
RF60i-X / D-SERIAL-ANALOG-IN-AL-СС (90X) (R) -MHPB
| 象征 | 描述 |
| 一世 | 索引:3Р 或 7 或 3Txt |
| X | 基本距离(场开始),毫米 |
| D. | 测量范围,毫米 |
| 串行 |
串口类型: (232(RS232)或485(RS485))和(ET(以太网)) |
| 模拟 | 显示存在 4 ... 20 mA (I) 或 0 ... 10 V (U) 的属性 |
| 在 | 带触发输入的传感器(同步输入) |
| 到 | 用户编程输入/输出信号 |
| CC (90X) (R) |
电缆接头 - CG,或电缆接头 - CC(Binder 712,IP67) 注 1:带以太网接口的传感器有 2 个接头或两个电缆接头。 注 2:选项 90X - 斜角电缆连接器(参见第 18.3 页)。 注 3:选项 R - 机器人电缆 |
| 米 | 电缆长度,米 |
| H | 带集成加热器的传感器 |
| P。 | 带空气冷却系统的保护箱中的传感器(参见第 18.1 页。) |
| B. | 带防溅罩的传感器(参见第 18.2 页) |
示例: RF603P-125 / 500-232-I-IN-AL-ССR90А-3 - 用于测量路面轮廓和结构的激光传感器 RF603P,基距 - 125 mm,测量范围 - 500 mm,RS232 串行端口,4 … 20 mA,模拟输出,触发输入和 AL 输入,电缆连接器,弯型,位置“A”,机器人电缆,电缆长度 3 m 可用。